
 .
.
Pertama, sobat harus siapkan dulu komponen komponen seperti daftar di bawah ini :
- Resistor 33k, 4 buah.
- LDR, terserah, boleh yang besar, boleh yang kecil. 4 buah.
- IC LM324 + soket (gapake soket juga gapapa. Tapi saya saranin pake soket). 1 Buah.
- Dioda 1N4148, 5 Buah.
- Resistor 100 Ohm, 2 Buah.
- Transistor BD139, 2 Buah.
- Sepasang gear box (Kiri, kanan).
- IC Regulator 7805.
- Trimpot 50k 4 buah. (Saya saranin pake trimpot duduk)
Oke, itu komponen yang wajib sobat punya. Kalau ga punya, silahkan beli
aja di toko elektronik terdekat. Komponen seperti itu gampang semua ko'
dicarinya.
Sekarang kita mulai dari tegangan.
Sumber tegangannya udah pasti pakai battery kan ? Nah, Sumber
tegangannya harus diatas 5 Volt, karena disini kita pakai IC regulator
7805. Kalau kita pakai tegangan dibawah 5 Volt, ya ga akan hidup dong :p
.
Kita mulai dari listrik. Pertama, si battery masuk ke IC 7805. Tapi
tetep, tegangan asli dari battery nya bakalan kita pakai untuk
menggerakan motor. Skematiknya seperti ini :

Dari battery, masuk ke kaki 1, Kemudian kaki 2 nya dikasih negatifnya.
Nah, kaki tiganya langsung jadi tegangan linier 5 Volt. Kenapa sih harus
pakai ini ? Supaya kita cukup sekali setting saja untuk sensornya. Jadi
tidak peduli tegangan battery mau berapa volt, Sensitivitas sensor
tetap tidak akan terganggu. Kan sensornya tetep di kasih 5 Volt.
Nah, kemudian kita ke sensor. Disini kan udah jelas banget. Sambil merem
juga pasti udah tau sensornya yang mana ? Coba tebak hayo ?!
Nah, bener banget, LDR (Padahal belom jawab ya?). LDR disini kita
rangkai menjadi pembagi tegangan dengan resistor 33k. Karena ada 4
sensor, jadi kita buat rangkaian pembagi tegangannya ada 4. Nah,
sekarang Skematiknya jadi seperti ini :

Gimana, kurang gede ? Klik aja, nanti keluar deh yang aslinya.
Nah, sampe sini paham kan ? itu yang lambangnya 5V, itu disambung semua. Yang lambangnya ground juga sama, disambung semua.
Sensor ini begini cara kerjanya. Kita ambil contoh 1 sensor, terserah
mau yang mana, orang sama semua ko' :D . Nah, dari resistor yang atas ke
resistor yang bawah, itu kan ada sambungan. Nah, sambungan itulah yang
menjadi output sensornya. Jika sensor berada di tempat gelap, maka
outputnya akan mengeluarkan tegangan yang mendekati 5 Volt. Ketika di
tempat yang terang, maka sensor akan mengeluarkan tegangan yang
mendekati 0 Volt. Kalau di tempat yang sedang sedang saja, ya
tegangannya juga sedang sedang saja. Pokonya, tegangan outputnya itu
variabel, sesuai dengan kondisi cahaya yang mengenainya.
Oke deh. Sampai sini, kita udah punya sensor. Sekarang masalahnya,
output dari setiap sensor itu berbeda beda, meskipun kondisi cahaya yang
mengenainya itu sama. Nah, solusinya adalah, kita pakai IC LM324. IC
disini bukan IC tingkat dewa ko' :D . Santai aja.
IC ini punya 4 Op-Amp. Kalau sobat masih belom kenalan sama op-amp,
sobat bisa liat postingan saya tentang op-amp. ada ko' di menu bar yang
ada di atas. Tinggal klik aja Op-Amp.
Op-Amp disini kita jadikan komparator Dan masing masing Op-Amp, kita
berikan dia masing Trimpot 50k sebagai tegangan referensinya. Kan jadi
pas tuh. Sensor 4 buah, Op-Amp 4 buah, dan sebagai tegangan referensi
op-amp nya juga 4 trimpot.
Oh iya, kan ada 4 sensor, Sensor itu kita letakkan di bagian depan,
kiri, kanan, dan belakang. Sekarang, skematiknya jadi seperti ini :

Sekarang coba deh. Kita perhatikan skematiknya. Kita perhatikan aja satu
sensor. Misalkan saya pilih sensor kanan. Output dari sensor kanan
masuk ke input non inverting op-amp. Lalu tegangan dari VR yang dibuat
pembagi tegangan itu, dimasukkan ke input inverting op-amp. Nah, Jadi
kalau misalkan tegangan dari sensor itu lebih besar dari tegangan VRnya,
output dari op-amp nya jadi saturasi, dan itu terjadi jika sensor
berada di tempat yang terang. Nah, intinya, output dari op-amp akan
saturasi, atau berlogika 1, atau mengeluarkan tegangan kurang lebih 4
Volt jika sensor sudah menyatakan kalau dia mendeteksi cahaya. disini, kita tinggal menyetting VRnya saja.
Cara menyettingnya, simak baik baik ya :
Pertama, kita pastikan dulu. Op-amp akan mengeluarkan logika 1, di tempat yang pencahayaannya bagaimana ?
Kedua, Si sensor kita berikan cahaya sesuai dengan yang kita inginkan.
Kalau cara saya sih, sensornya saya sorot aja pake senter.
Ketiga, kita ukur tegangan output op-amp dengan multimeter. Jika ada
tegangannya, putar VRnya secara perlahan lahan (sangat perlahan) sampai
output op-amp tidak memiliki tegangan. Ketika tegangannya hilang, tidak
usah di putar lagi. .. Tapi jika ketika kita ukur tegangannya, ternyata
memang tidak ada tegangannya. Berarti kita putar dulu VRnya sampai si
op-amp mengeluarkan tegangan. Ketika sudah mengeluarkan tegangan, putar
lagi dengan berbalik arah perlahan lahan (sangat perlahan) sampai output
op-amp tidak memiliki tegangan. Ketika tegangannya hilang, tidak usah
di putar lagi. Nah, sip. Sekarang, satu sensor sudah kita setting. :)
Keempat, kita lakukan hal yang sama untuk sensor sensor lainnya.
Usahakan pencahayaannya sama persis. Setelah itu, selesai :) . Sekarang,
kita sudah mempunyai 4 sensor cahaya yang mendeteksi cahaya secara
linier.
Sekarang masalahnya adalah, bagaimana kita mengkombinasikan 4 sensor untuk menggerakan 2 gearbox ?
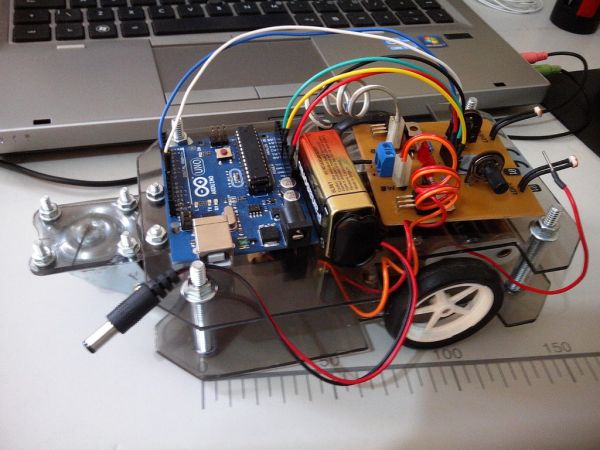
Oke deh. sekarang kita ikuti ilustrasi berikut :

Nah, itu robot light follower punya saya. Kita perhatikan desainnya aja ya.
Bentuk mekaniknya, 2 ban dibelakang dan 1 roll on di depan sebagai roda depan.
1 ban itu, 1 gearbox dan 1 dinamo, jadi putaran roda bisa berbeda beda.
Sekarang, gimana caranya supaya robotnya bisa belok kiri, belok kanan, dan maju ?
belok kiri => ban kiri mati, ban kanan maju.
belok kanan => ban kanan mati, ban kiri maju.
Sekarang, gimana caranya supaya bannya bisa mati ? gampang, ya dinamonya
ga usah dikasih listrik. Atau listrik yang mengalir ke dinamo diputus
(sama aja sih). Kan otomatis dinamonya jadi tidak berputar tuh.
Saya sekedar mengingatkan aja. dinamo itu kan akan berputar jika dikasih
listrik kan ? dinamo disini bukan dinamo mesin air loh :p .
Nah, sekarang kita tinggal memanfaatkan sensornya untuk bisa menggerakan dinamonyanya.
- Jika sensor depan mendeteksi cahaya, maka op-amp dari sensor kanan akan memberikan tegangan ke dinamo kiri dan dinamo kanan (hasilnya, robot akan bergerak maju).
- Jika sensor kiri mendeteksi cahaya, maka op-amp dari sensor kiri akan memberikan tegangan hanya ke dinamo kanan saja (hasilnya, robot akan belok kiri).
- Jika sensor kanan mendeteksi cahaya, maka op-amp dari sensor kanan akan memberikan tegangan hanya ke dinamo kiri saja (hasilnya, robot akakn belok kanan)
- Jika sensor belakang mendeteksi cahaya, maka op-amp dari sensor belakang akan memberikan tegangan hanya ke dinamo kanan saja. (kalau ini sih terserah. mau ke dinamo kanan boleh, ke dinamo kiri boleh).
Nah, cara gabunginnya, kita gunakan dioda sebagai jembatan. Tujuannya
supaya Op-Amp yang satu dengan Op-Amp yang lain tidak tarik menarik
tegangannya.. Sekarang, skematiknya jadi seperti ini :

Nah, sampe sini pasti udah mulai kebayang kan gimana cara menghidupkan
dinamonya. Jadi yang "ke dinamo kiri" untuk menggerakan dinamo kiri.
yang "ke dinamo kanan" untuk menggerakan dinamo yang kanan. Tapi muncul
pertanyaan nih. gimana bisa coba, output dari Op-Amp yang arusnya kecil
menggerakan dinamo yang membutuhkan arus yang lumayan besar ?
Maka dari itu, kita membutuhkan transistor sebagai penguat. Disini, kita
bisa saja tinggal menguatkan output tersebut dengan transistor,
kemudian output dari transistornya disambung ke dinamo. Begitunya juga
sudah cukup untuk menggerakan motor. Hanya saja putarannya lemah.
Jadi disini, transistor saya jadikan sebagai saklar yang memutus jalur negatif. gambarannya seperti ini:
 |
| Gambar 1 |
 |
| Gambar 2 |
Nah, sekarang. transistornya diganti saklar. Gambarannya jadi seperti ini :
Oke. Sekarang. kita kembali lagi ke skematik. Sekarang skematiknya sudah lengkap, menjadi seperti ini :

Oke sip. itu adalah skematiknya. Nah, kalau sobat butuh layoutnya. sobat
tinggal save aja gambar ini terus langsung print. INGAT !! Jangan di
rubah rubah ukurannya. dan ga usah di mirror mirror. ini udah tinggal
sablon aja. Asli rancangan saya. Emang sih ukurannya cukup besar. kan di
sesuaikan dengan ukuran robotnya :D
Gambar layout tampak bawah:

Gambar layout tampak atas :

Gambar layout tampak atas (mirror) :

Tidak ada komentar:
Posting Komentar